Pro/E (Creo) 机构仿真 完整教程
第一部分:核心概念与准备工作
在开始之前,我们需要理解几个核心概念:

(图片来源网络,侵删)
-
什么是机构仿真? 机构仿真是在虚拟环境中,模拟机械系统的运动、力、干涉等情况,从而验证设计、优化性能、减少物理样机成本的过程,在 Creo 中,这个功能模块被称为 “Mechanism”(机构)。
-
机构仿真的基本要素:
- 主体: 机构中不发生相对运动的零件集合,可以是一个零件,也可以是多个焊接在一起的零件,每个机构至少需要一个主体(通常是机架)。
- 连接: 定义两个主体之间如何相对运动,旋转、滑动、圆柱、平面等,连接是定义自由度的关键。
- 伺服电机: 为机构提供动力,定义运动的规律(如恒定速度、位置或加速度)。
- 分析: 定义仿真的类型和时长,例如运动学分析(只看运动,不考虑力)或动态分析(考虑力、质量、重力等)。
- 测量: 在仿真过程中,跟踪关键数据,如位置、速度、加速度、力等,并生成图表。
- 回放: 查看仿真结果,并可以制作成视频。
-
准备工作:
- 软件版本: 本教程基于 Creo 7.0/8.0,但核心步骤在较新或较旧的版本中基本通用。
- 模型要求: 你的装配体模型必须完整,所有零件都已创建并装配好。注意: 此时装配时使用的“约束”(如对齐、重合)只是几何上的定位,在机构中,你需要重新定义“连接”来定义运动。
第二部分:详细操作步骤 - 以一个简单的“曲柄滑块机构”为例
假设我们要仿真一个经典的曲柄滑块机构,

(图片来源网络,侵删)
- 一个电机驱动曲柄旋转。
- 曲柄带动连杆。
- 连杆推动滑块在导轨上做往复直线运动。
目标: 验证滑块的运动是否符合预期,并测量其速度。
步骤 1:进入机构模块
- 打开你的装配体文件(
.asm)。 - 在顶部功能区,点击 “应用程序” 选项卡。
- 在下拉菜单中选择 “机构”。
界面会切换到机构环境,并出现一个 “机构” 选项卡。
步骤 2:定义连接
这是最关键的一步,我们需要将静态的装配约束转化为允许特定运动的“连接”。
- 点击 “机构” 选项卡 -> “连接” 区域 -> “连接” 按钮。
- 在弹出的“连接”对话框中,依次为每个零件定义连接。
示例:曲柄、连杆、滑块的连接

(图片来源网络,侵删)
-
机架: 地基或固定不动的零件,通常定义为 “销钉” 连接,但为了固定,我们选择 “刚性” 连接,使其成为不动的主体。
- 选择机架零件。
- 在“连接类型”中选择 “刚性”。
- 点击“确定”。
-
曲柄: 与机架用销钉连接,可以旋转。
- 点击“连接”对话框中的 “新建” 按钮。
- 在“连接类型”中选择 “销钉”。
- “轴对齐”: 分别选择曲柄和机架上的旋转轴。
- “平移”: 选择两个零件上要对齐的平面(曲柄的端面和机架的安装面),使它们贴合。
- 点击“确定”。
-
连杆: 一端与曲柄用销钉连接,另一端与滑块用销钉连接。
- 再次点击“新建”。
- 选择 “销钉” 连接。
- “轴对齐”: 选择连杆的一端孔和曲柄上的孔。
- “平移”: 选择连杆端面和曲柄的侧面。
- 点击“确定”。
- (重复此步骤) 定义连杆另一端与滑块的销钉连接。
-
滑块: 与机架(或导轨)用“滑动杆”连接,使其只能沿直线移动。
- 点击“新建”。
- 在“连接类型”中选择 “滑动杆”。
- “轴对齐”: 选择滑块的导向孔和机架上的导轨。
- “旋转”: 选择滑块的底面和机架的顶面,限制其不能旋转。
- 点击“确定”。
完成所有连接后,检查“连接”对话框,确保所有零件都已定义,没有“自由度”剩余(除了预期的运动自由度)。
步骤 3:添加伺服电机
- 点击 “机构” 选项卡 -> “建模” 区域 -> “伺服电机”。
- 在“伺服电机定义”对话框中:
- 名称: 给电机起个名字,如
Motor_Crank。 - 从动图元: 选择电机要驱动的轴,点击 “从动图元” 下方的箭头,然后去图形窗口中选择曲柄的旋转轴。
- 模: 选择 “位置”、“速度” 或 “加速度”,对于匀速旋转,选择 “速度”。
- 函数: 在这里定义运动规律。
- 选择 “常数”,然后在 A 栏输入你想要的转速,
360(表示每秒转360度,即1圈/秒)。 - 如果要更复杂的运动,可以使用 “表” 或 “数学” 函数。
- 选择 “常数”,然后在 A 栏输入你想要的转速,
- 轮廓: 可以设置运动的开始和结束时间。
- 点击“确定”。
- 名称: 给电机起个名字,如
步骤 4:运行分析
- 点击 “机构” 选项卡 -> “分析” 区域 -> “机构分析”。
- 在“分析定义”对话框中:
- 名称: 如
Kinematic_Analysis。 - 类型: 选择 “运动学”,运动学分析只计算运动学关系,速度快,不考虑力,如果需要分析力、弹簧、重力等,则选择 “动态”。
- 开始时间: 通常为
0。 - 结束时间: 设置仿真的总时长,电机转5圈,转速是1圈/秒,那么时长就是
5秒。 - 帧数: 决定了在动画中生成多少个关键帧,数字越大,动画越流畅,但计算时间也越长,默认值通常足够。
- 点击 “运行”。
- 名称: 如
你会看到模型开始运动,模拟电机驱动下的整个过程。
步骤 5:创建和查看测量
- 点击 “机构” 选项卡 -> “分析” 区域 -> “测量”。
- 在“测量结果”对话框中:
- 点击 “创建新测量” 按钮。
- 名称: 如
Slider_Velocity。 - 类型: 选择 “速度”。
- 点或运动轴: 选择你想要测量的对象,选择滑块上的一个点,或者滑块与连杆的连接轴。
- 评估方法: 选择 “每个时间步长”。
- 点击 “确定”。
- (可选)可以再创建一个位置测量,如
Slider_Position。
- 回到“测量结果”对话框,你会看到创建的测量项。
- 确保勾选了你要查看的测量项(如
Slider_Velocity),然后点击 “绘制结果” 按钮。
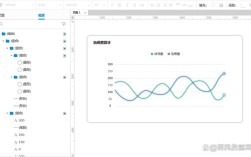
此时会弹出一个图表窗口,显示滑块速度随时间变化的曲线,你可以通过这个图表分析运动是否平稳、有无冲击等。
步骤 6:回放和制作视频
- 点击 “机构” 选项卡 -> “分析” 区域 -> “回放”。
- 在“回放”对话框中:
- 结果集: 选择你刚才运行的分析(如
Kinematic_Analysis)。 - 点击 “播放当前结果” 的三角按钮,即可观看动画。
- 动态干涉检查: 勾选此选项,可以在回放时检查模型中是否有零件发生干涉,如果发生干涉,零件会高亮显示。
- 捕获: 点击 “捕获” 按钮,可以设置视频格式(如
.mp4)和分辨率,将仿真过程保存为视频文件,方便分享和演示。
- 结果集: 选择你刚才运行的分析(如
第三部分:进阶技巧与常见问题
-
动态分析 vs. 运动学分析
- 运动学分析: 只关心“怎么动”,不考虑力、质量、重力、弹簧、阻尼等,速度快,用于验证运动轨迹和顺序。
- 动态分析: 关心“为什么这么动”,需要考虑所有物理因素,需要定义零件的质量属性(在“属性”中检查)、重力、弹簧、力等,计算复杂,但结果更真实,用于分析受力、振动等。
-
质量属性
- 在进行动态分析前,必须确保所有零件都有正确的质量属性。
- 点击 “机构” 选项卡 -> “属性” 区域 -> “质量属性”。
- 选择零件,可以自动计算(如果材料已定义),或手动输入质量和惯性矩。
-
弹簧和阻尼器
- 用于模拟弹性连接和能量消耗。
- 点击 “机构” 选项卡 -> “建模” 区域 -> “弹簧” 或 “阻尼器”。
- 需要指定连接的两个点或两个主体。
-
力/扭矩
- 可以在某个主体上施加外部力或扭矩。
- 点击 “机构” 选项卡 -> “建模” 区域 -> “力/扭矩”。
-
常见问题:
- 模型无法运动: 检查“连接”定义,是否过度约束(自由度为0)或约束不足,确保“连接”正确替换了静态的装配约束。
- 运动不连续或报错: 检查伺服电机的运动函数是否合理,是否存在突变,检查零件之间是否存在几何干涉。
- 测量结果为0或异常: 检查测量的“点或运动轴”是否选择正确,确保分析已经成功运行。
Creo 的机构仿真是一个功能强大的工具,遵循 “定义连接 -> 添加动力 -> 运行分析 -> 查看结果” 的基本流程,你就可以完成绝大多数的机构运动验证工作。
练习建议:
- 从最简单的“四杆机构”开始练习。
- 尝试改变伺服电机的速度函数(如正弦函数),观察对输出运动的影响。
- 在动态分析中,为机构添加重力,观察其如何影响运动。
希望这份教程对你有帮助!祝你学习顺利!